



Cengiz Özemli
Akademisyen
- Konu Yazar
- #1
Robotiq, robot kollarında kavrama performansını artırmak için basınç ve titreşim algılayabilen TSF-85 taktil parmak kitini tanıttı.
Kanadalı robotik uç ekipman üreticisi Robotiq, sıradan robotik operasyonların algılayıcı yeteneklerini geliştiren TSF-85 adlı taktil parmak kitini piyasaya sürdü. Bu yeni sensör, sıradan kavrama geri bildirimlerinin ötesinde yüksek çözünürlükte basınç ve titreşim verisi sağlayarak robotun kavrama tutarlılığını ve parça tutma güvenilirliğini artırmayı hedefliyor. Böylece fiziksel yapay zekâda daha detaylı veri toplanıp her hareket analiz edilerek operasyonlar optimize edilebilecek.
### Robotiq TSF-85 Özellikleri
- 4x7 basınç sensörü matrisi ile dokunma benzeri veri toplama
- Basınç ve titreşim algılama yeteneği
- Yumuşak, dayanıklı neopren kaplama
- Maksimum kavrama kuvveti: 225 N
Robotlarda kavrama geri bildirimi yeni bir kavram değil. Elektrik ya da pnömatik güçle çalışan gripperlar, pozisyon sensörleri ve motor akımı ya da basınç sensörleri ile durumlarını kontrol edebiliyor. Temel geri bildirimler genellikle "gripper açıldı mı/kapatıldı mı?" veya "parça doğru şekilde tutuldu mu?" gibi soruları yanıtlıyor.
Ancak daha gelişmiş sorular da önemli: Parça her seferinde aynı şekilde mi kavranıyor? Parça üzerinde tanımlayıcı delikler veya çıkıntılar var mı? Parça gripper içinde merkezde mi? Bu bilgilerle kavrama işlemleri zaman içinde daha tutarlı ve güvenilir hale getirilebiliyor, çevrim hızları düşürülüp sistemdeki değişkenlikler tolere edilebiliyor.
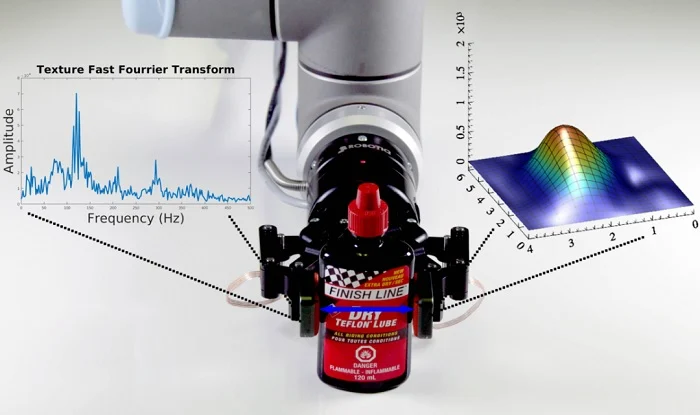
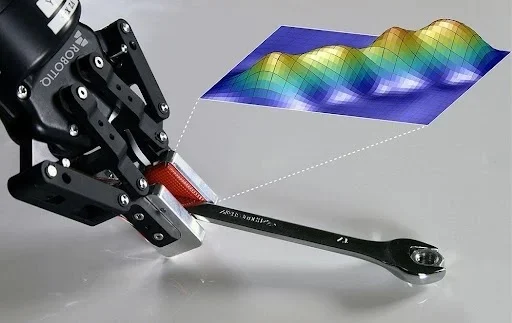
TSF-85, verimli bir pakette bu çözümü sunuyor. 4x7 sensör matrisi, basınca duyarlı bir dokunmatik ekran hissi veriyor. Neopren kaplama hem esneklik sağlıyor hem de daha önce kavranan çoğu parçayı güvenle tutabiliyor. Yazılım geliştirme kiti (SDK) ile kavrama profilleri grafiksel olarak görüntülenebiliyor.
Örneğin test aşamasında robot yavaş hareket ederken kavrama stabil görünebilir; hız arttığında kavrama pozisyonu değişebilir. TSF-85’in sunduğu hassas pozisyon algılama sayesinde robot bu küçük hız değişikliklerine de uyum sağlayabilir.
Bir diğer örnek, ortasından delik geçen bir küp parçası kavranırken sadece pozisyon algılama varsa delikli yüzeyin kavrandığı anlaşılamaz. Ancak 2D kavrama profili sayesinde robot, parçanın özelliklerini, konumunu ve yönünü tespit ederek daha doğru yerleştirme yapabilir.
Şu an TSF-85 verileri doğrudan robot kontrol sistemlerine entegre edilmemiş olsa da, kullanıcı tabanı büyüdükçe hızlıca projeler ilerlemekte. Veriler USB üzerinden PC’ye iletilip grafik ve analiz için kullanılmaktadır.
Daha fazla veri ihtiyacı arttıkça asıl zorluk sensörler değil, bu sensörlerin süreçleri etkilemeden doğru şekilde entegre edilmesi ve verilerin KPI analizleri ile süreç iyileştirmeye dönüştürülmesidir.


















