


- Konu Yazar
- #1

Bu rehber, Mitsubishi FX3U PLC ile FR-D700 invertör arasında FX3U-485-BD iletişim kartı kullanılarak RS-485 haberleşmesinin nasıl kurulacağını gösteriyor. Merkezde, schneidler merdiven mantığı ile hız kontrolü ve sistem takibi gerçekleştirilir.
Endüstriyel motor kontrollerinde genellikle dijital ve analog sinyaller için ayrı kablolama yerine, RS-485 gibi seri ağlar üzerinden doğrudan PLC ile VFD (Değişken Frekans Sürücülere) bağlantı tercih edilir. Bu yaklaşım, karmaşık kablolamayı azaltır, tanılama kolaylığı sağlar ve motor hızını PLC programından doğrudan kontrol edebilme imkanı sunar.
### Haberleşme Donanımı ve Bağlantı
Örnek uygulamada FX3U PLC üzerine takılan FX3U-485-BD genişletme kartı ile kalkanlı bükümlü çift kablo üzerinden FR-D700 invertöre bağlantı yapılır. FX3U-485-BD kartı, seri haberleşmeyi sağlar ve uygun donanım ile birlikte kullanılmalıdır. Invertör, RS-485 arayüzü ile Mitsubishi protokolü ve Modbus komutlarını destekler.
- RS-485 bağlantısı için SDA ve SDB fark sinyal çiftleri kullanılır.
- SG ucu toprak referansı için gereklidir.
- VFD tarafındaki konnektör 8 pin RJ45’tir (RS-232/RS-485’te yaygın olan 6 pin RJ12 değil).
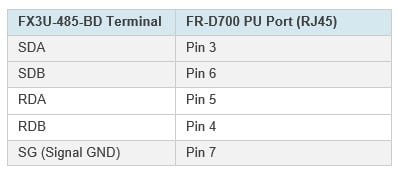
### FR-D700 ve FX3U-485-BD Pin Eşlemesi
Pin konfigürasyonu ve bağlantılar tabloda detaylandırılmıştır. VFD parametre ayarları seri haberleşme protokolüne uygun olarak yapılandırılmalıdır.
### VFD Parametre Ayarları
- Pr.160 parametresi 0 yapılarak iletişim parametrelerine gelişmiş erişim açılır.
- Pr.77 parametresi 2 yapılarak yeni ayarların kabulü sağlanır.
- İlgili parametre değerleri VFD ve PLC arasındaki seri haberleşme ayarlarını uyumlu hale getirmek için düzenlenir.
- Ayarlardan sonra VFD resetlenerek yeni ayarlar aktif edilir.
- Doğru ayar sonrası VFD ekranda "NET" göstergesi ile haberleşmeye hazır olduğunu belirtir.
### PLC Tarafı Haberleşme Ayarları
- FX3U-485-BD modülünün 1. kanalı için D8120 özel kaydı ile seri port haberleşme formatı tanımlanır.
- Bu kayıt ile baud rate, veri formatı ve protokol ayarları yapılır. (Örnek: 9600 baud, RS-485, 8 veri biti, çift parite, 1 stop biti - 9600-8-E-1)
- İletişim zaman aşımı D8129 kaydına ms cinsinden yazılabilir.

### Haberleşme Programlama Yaklaşımları
- Geleneksel yöntem: Ladder program içinde H8097 kodu D8120 kaydına MOV komutu ile atanır.
- Modern alternatif: Parametre navigasyonundan doğrudan PLC parametreleri üzerinden haberleşme ayarları yapılabilir, ladder logic kullanılmayabilir.
### Haberleşme Kontrol Mantığı
- PLC, M8012 zaman bazlı saat pulsunu kullanarak sayaç tetikler ve servo sürücüyü adım adım kontrol eder.
- Asenkron çalışan inverter komutları (IVWR, IVDR, IVRD) ile frekans ve çalışma komutları gönderilir, geri bildirim alınır.
### Komut Fonksiyonları
- IVWR: Frekans değerini ayarlamak için.
- IVDR: Sürücü çalışma komutlarını (ileri, geri, dur) yönetmek için.
- IVRD: Çıkış frekans bilgisi okunur.
### Uygulama ve Test
- D20 kaydı frekans ayarı için kullanılır (örneğin 2000 değeri motor için 20,00 Hz’e karşılık gelir).
- D10 kayıtları hareket komutlarını (2: ileri, 0: dur) tutar.
- FX3U-485-BD üzerindeki SD ve RD LED’leri veri gönderme/alma durumunu gösterir.
- Sadece SD LED yanıyorsa, cihazdan cevap alınamamış demektir. Bu durumda bağlantılar, adres ve parametreler kontrol edilmelidir.
- Motor komutları verilip D200 kayıtları ile frekans çıktı kontrol edilir.
### Genel Değerlendirme
RS-485 uygulamasındaki farklı üretici varyasyonları olsa da temel prensipler benzerdir. Haberleşme sorunlarının büyük çoğunluğu donanım bağlantısı ve protokol uyumsuzluğundan kaynaklanır, mantık programından değil.
Tüm görseller yazarın izniyle paylaşılmıştır.